TQMa62xx - YOCTO Linux BSP documentation
Create SD-Card image
Create SD Card with BSP Image
The Image can be simply written to the SD Card by using the dd shell command in Linux:
$ cd <path to your image> $ sudo dd if=tq-image-weston-debug-tqma62xx-mba62xx.rootfs.wic of=/dev/sdc bs=1M conv=fsync #Assuming the SD card is assigned to /dev/sdc
To identify the SD card in Linux the shell command dmesg can be used:
- Open a new terminal
- Execute the following command without plugged SD Card
$ dmesg | tail -n 15
- Insert SD Card and wait a few seconds
- Run the command from step two again
$ dmesg | tail -n 15 #plug in SD Card into the reader $ dmesg | tail -n 15
USB Boot
USB Boot
The TI Sitara AM62x CPU provides the option to boot from USB (host and device).
Prerequisites
- Build BSP following STKa62xx Yocto BSP quickstart guide.
- Booting the STKa62xx from USB device requires a Linux based host PC to run the dfu-util.
Boot from USB host (mass storage)
1. Format a USB flash drive with FAT32 filesystem.
2. Copy the files listed below from the Yocto buildspace deploy directory to the USB flash drive prepared with FAT32:
- u-boot.img
- tispl.bin
- tiboot3.bin
3. Connect the USB flash drive with the USB 3.0 the USB-OTG interface.
4. Set the STKa62xx DIP switches to boot from USB host (mass storage).
S4 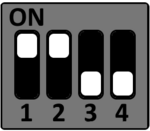
S5 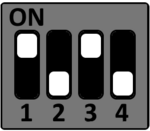
S6 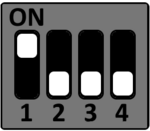
S7 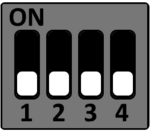
5. Connect host PC with STKa62xx connector X10 and setup the terminal program.
Please see the terminal_emulator section how to setup a serial debug connection.
6. Power on the STKa62xx to boot from USB.
Boot from USB device (dfu-util)
Please check that dfu-util is installed the Linux host.
1. Copy the files below from the Yocto buildspace deploy directory deploy e.g. the home folder:
- u-boot.img
- tispl.bin
- tiboot3.bin
2. Connect STKa62xx X7 and X10 with a mirco USB cable to the Host PC.
- X10 is used to connect the STKa62xx as USB device
- X7 is used as serial debug connection
3. Set the STKa62xx DIP switches to boot from USB device (dfu-util).
S4
S5
S6 
S7
4. Power up the STKa62xx.
5. Open a second terminal for the serial debug connection with e.g. Minicom
Please see the terminal_emulator section how to setup a serial debug connection.
6. Open terminal (shell) on Linux host and execute the commands below to boot the STKa62xx via USB device.
After a warm boot (reset from U-Boot or reboot from Linux), the initial load of tiboot3.bin must be skipped.
sudo dfu-util -a bootloader -D tiboot3.bin
If the STKa62xx has been reset from U-Boot or Linux it is not required to load tiboot.bin3 twice, so only the three commands below have to be executed.
sudo dfu-util -R -a bootloader -D tiboot3.bin sudo dfu-util -R -a tispl.bin -D tispl.bin sudo dfu-util -R -a u-boot.img -D u-boot.img
Flash SPI-NOR
Write Bootloader to SPI-NOR Flash via Network
The onboard SPI-NOR flash can be easily updated directly from the U-Boot command line using the built-in TQ update macros. This process downloads the required images from a TFTP server and flashes them automatically to the correct partitions.
Prerequisites
- A TFTP server running on your host PC containing the bootloader files.
- An active Ethernet connection between the STKa62xx and your host PC.
- The required bootloader files compiled for the correct SoC variant (
tiboot3.bin,u-boot.img,boot.scr).
Update via U-Boot (TFTP)
1. Copy the bootloader files from the Yocto deploy directory into the root directory of the TFTP server.
tiboot3.bin for your SoC security state! For standard AM62x SR1.0 boards, the HS-FS (High Security - Field Securable) image must be used.
2. Power on the STKa62xx and stop the autoboot process by pressing any key when prompted to enter the U-Boot shell (⇒).
3. Configure network settings in U-Boot (adjust the IP addresses to match your network):
=> setenv ipaddr <Board-IP> => setenv serverip <Host-PC-IP>
4. Execute the pre-configured TQ update macros to automatically download and flash the bootloader and boot script:
# 1. Update tiboot3.bin and u-boot.img => run update_uboot_spi_flash0 # 2. Update the boot script (boot.scr) => run update_bootscript_spi_flash0
5. Power off the STKa62xx.
6. Set the STKa62xx DIP switches to boot from SPI (See DIP Switches)
7. Power on the STKa62xx. The board should now boot directly from the SPI-NOR flash.
Flash eMMC
Write Bootloader to eMMC via Network
The onboard eMMC can be updated directly from the U-Boot command line using the built-in TQ update macros. This process downloads the required images from a TFTP server and writes them to the boot partition of the eMMC.
Prerequisites
- A TFTP server running on the host PC containing the bootloader files.
- An active Ethernet connection between the STKa62xx and the host PC.
- The required bootloader files compiled for the correct SoC variant (
tiboot3.bin,u-boot.img,boot.scr).
Update via U-Boot (TFTP)
1. Copy the bootloader files from the Yocto deploy directory into the root directory of the TFTP server.
tiboot3.bin is used for the SoC security state. For standard AM62x SR1.0 boards, the HS-FS (High Security - Field Securable) image must be used.
2. Power on the STKa62xx and stop the autoboot process by pressing any key when prompted to enter the U-Boot shell (⇒).
3. Configure the network settings in U-Boot (adjust the IP addresses to match the local network):
=> setenv ipaddr <Board-IP> => setenv serverip <Host-PC-IP>
4. Execute the pre-configured TQ update macros to automatically download and write the bootloader and boot script to the eMMC (mmc0):
# 1. Update tiboot3.bin and u-boot.img => run update_uboot_mmc0 # 2. Update the boot script (boot.scr) => run update_bootscript_mmc0
5. Power off the STKa62xx.
6. Set the STKa62xx DIP switches to boot from eMMC (See DIP Switches).
7. Power on the STKa62xx. The board should now boot directly from the eMMC.