TQMa8Xx4 - YOCTO Linux BSP documentation
CAN
The MBa8Xx provides two CAN interfaces: CAN0 and CAN1.
CAN configuration
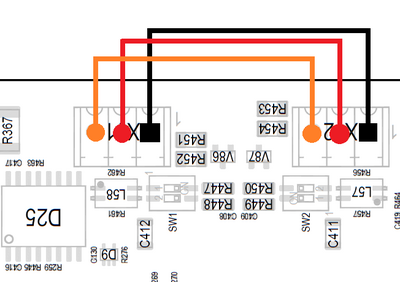
DIP switch SW1 is used to configure CAN0.
| Function | SW1-1 | SW1-2 |
|---|---|---|
| CAN-Bus not terminated | OFF | OFF |
| not defined (illegal state) | OFF | ON |
| not defined (illegal state) | ON | OFF |
| CAN-Bus terminated with 120 Ohm | ON | ON |
DIP switch SW2 is used to configure CAN1.
| Function | SW2-1 | SW2-2 |
|---|---|---|
| CAN-Bus not terminated | OFF | OFF |
| not defined (illegal state) | OFF | ON |
| not defined (illegal state) | ON | OFF |
| CAN-Bus terminated with 120 Ohm | ON | ON |
CAN Loopback
CAN Loopback Test
CAN0 -> CAN1
candump can0& cansend can1 5A1#11.2233.44556677.88
CAN1 -> CAN0
candump can1& cansend can0 5A1#11.2233.44556677.88